EU-Forschungsprojekt ermöglicht die enge Zusammenarbeit in Mensch-Maschine-Teams
Im Zentrum vieler Zukunftsbilder der Wirtschaft findet sich die enge Zusammenarbeit von Mensch und Maschine. Während in vielen Betrieben der industriellen Massenproduktion Roboter noch abgeschirmt vom Menschen hinter Sicherungsgittern isoliert arbeiten, übernimmt die Luftfahrtindustrie hier eine Vorreiter-Rolle. So arbeiten beispielsweise im Rahmen des EU-Projekts VALERI (Validation of Advanced, Collaborative Robotics for Industrial Applications) fahrbare Industrieroboter direkt mit Menschen zusammen, tragen Dichtmasse exakt gleichmäßig auf den Flugzeugrumpf auf oder überprüfen Flugzeugbauteile.
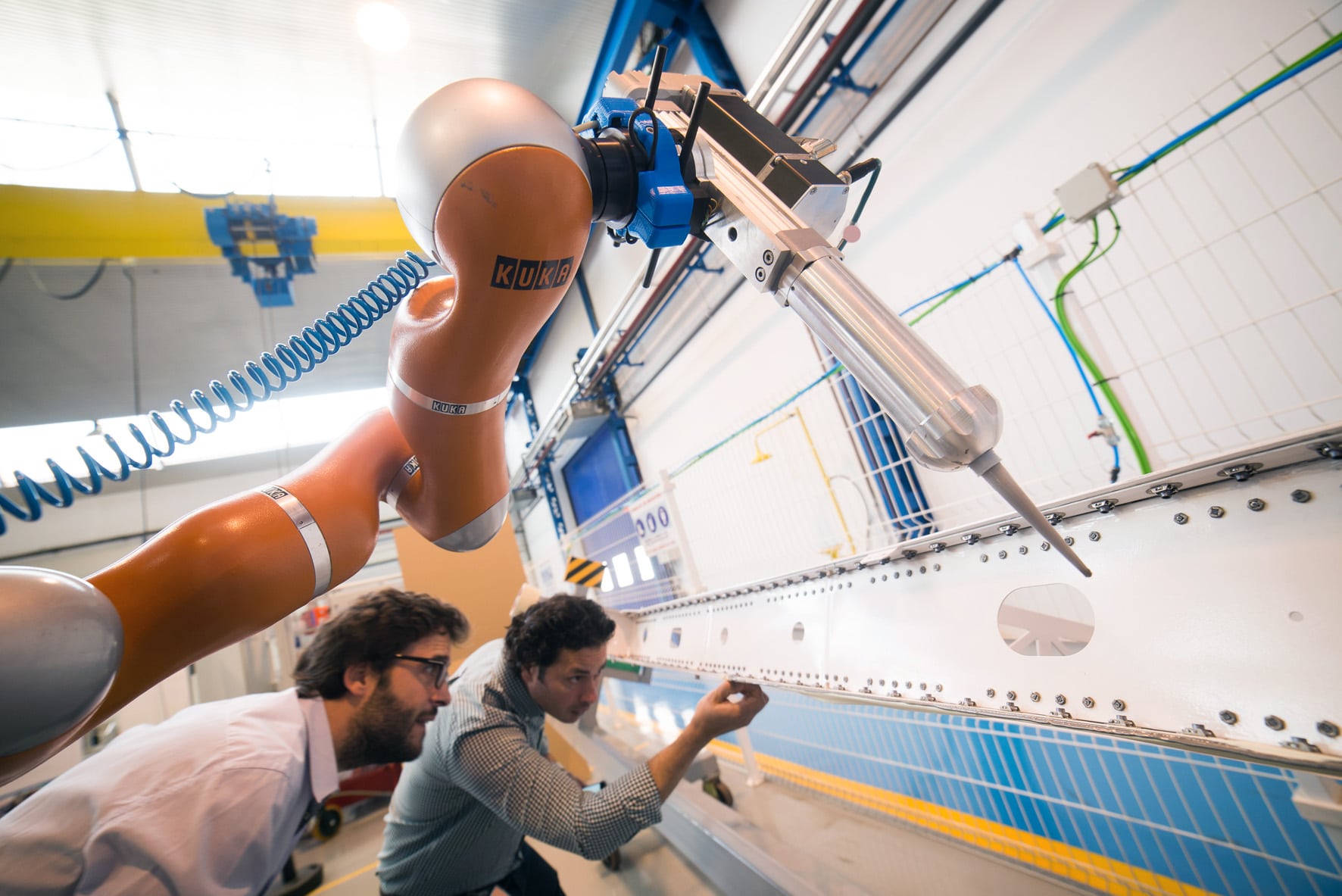
José Navarro, IDPSA, und José Saenz vom Fraunhofer IFF prüfen, wie VALERI das Dichtmittel auf ein Flugzeugbauteil aufgebracht hat. (Foto: KUKA)
Koordiniert vom Fraunhofer-Institut für Fabrikbetrieb und -automatisierung (IFF) in Magdeburg forschen die Experten insbesondere daran, die Aufgaben in der Produktion zu automatisieren, die die Gesundheit des Menschen gefährden oder die sehr monoton und körperlich anstrengend sind. Hierzu zählen auch Aufgaben im Flugzeugbau, die durch viele Fertigungsschritte hindurch immer wiederkehren und zukünftig von einem einzelnen mobilen Roboter ausgeführt werden sollen. Im Gegensatz zu der weit verbreiteten Meinung, die Roboter sollen die Fachkräfte ersetzen, wird hier gezeigt, wie Maschinen die Fachkräfte entlasten, ihnen assistieren und sie bei ihren Aufgaben unterstützen.
Im Rahmen des Projekts haben die Forscher die technischen Voraussetzungen dafür geschaffen, dass Mensch und Roboter nebeneinander arbeiten könne. Dass dies auch funktioniert und sicher ist, konnte in der Praxis ebenfalls gezeigt werden, sodass zukünftig Zäune und andere Schutzeinrichtungen aus den Produktionsstätten verschwinden können. Menschen und Roboter arbeiten dann direkt nebeneinander, vielleicht sogar an demselben Bauteil und sind dennoch voneinander unabhängig.

Flugzeug-Triebwerk im Monatgeprozess
Einen weiteren Vorteil bringt die Mobilität der im Projekt entwickelten Roboter mit sich. Heutzutage werden Großbauteile in feststehenden Fertigungszellen über mehrere Tage hinweg von Arbeitskräften in mehreren Schichten montieren und geprüft. Stationäre Robotersysteme sind in einem solchen Produktionsumfeld nicht wirtschaftlich. Jedoch durch die Flexibilität eines mobilen Roboters können zukünftig ähnliche Aufgaben an mehreren Arbeitsplätzen übernommen werden. Dabei können vorerst drei exemplarische Aufgaben übernommen werden: das Auftragen der Dichtmasse entlang einer Nut, das Kontrollieren im Anschluss und das Prüfen geflochtener CFK-Bauteile. Damit ein mobiler Roboter auch alle drei Aufgaben erledigen kann, ist er ebenfalls in der Lage, zwischenzeitlich seine Werkzeuge zu wechseln.
Ausgangspunkt des Projekts war ein vorhandener omniRob-Roboter, der schließlich so angepasst wurde, dass seine Reichweite für das Spektrum der vorgesehenen Aufgaben geeignet ist. Beispielsweise ergänzten die Experten drehbare, vertikale Linearachse, sodass der komplette Roboter zwölf Freiheitsgrade und eine menschenähnliche Reichweite besitzt. Parallel wurde auch das Werkzeug zum Auftragen der Dichtmasse entwickelt und in die Robotersteuerung integriert. Damit kann das Auftragen der Dichtmasse eng mit der Geschwindigkeit und Orientierung des Roboters abgestimmt werden. Entlang der gekrümmten und flachen Bahnen wird die Dichtmasse dadurch deutlich besser aufgetragen.

Montage eines Flugzeuges
Für den Werkzeugwechsel wurde darüber hinaus ein Kamera-basiertes Werkzeug für die Bauteilortung angepasst und integriert. Die Kamera erfasst 3D-Punktwolken und kann mit einer CAD-Matching-Software die Bauteile erkennen und orten. Somit können die Bauteile, die teilweise auf Rollen stehen und nicht immer in der gleichen Position in der Fabrik stehen, lokalisiert und bearbeitet werden. Auch zwei weitere Werkzeuge für die Überprüfung der Dichtmasse und der geflochtenen CFK-Bauteile wurde entwickelt.
Um die Mensch-Maschine-Zusammenarbeit letztendlich sicher zu gestalten, ergänzten die Forscher taktile Sensoren und ein kamerabasiertes Arbeitsraumüberwachungssystem. Die taktilen Sensoren erkennen dabei Berührungen. Sobald eine biomechanische Belastungsgrenze erreicht wird, stoppt der Roboter automatisch. Darüber hinaus sorgt das Arbeitsraumüberwachungssystem für Sicherheit. Es besteht aus einem Tiefenbildsensoren mit drei Stereokamerapaaren. Es erfasst die Bewegung des Werkzeugs und legt ein virtuelles Schutzfeld um diesen Bereich. Bewegt sich nun ein Mensch oder ein Objekt in dieses Schutzfeld, hält der Roboter an und vermeidet eine Kollision. Dies verhindert die Verletzung von Menschen und ermöglicht eine enge Zusammenarbeit von Mensch und Maschine, wie sie beispielsweise in Ansätzen des Zukunftsbildes Industrie 4.0 vorgestellt wird.
Quelle und weiterführende Information: Fraunhofer IFF, VALERI-Projekt
mobile Roboter in der Produktion
Pro
- kann gefährliche oder belastende Tätigkeiten übernehmen